単語辞書を作成します。
辞書ファイルを記述するとき、文字コードはUTF-8ではなくEUC-JPを使用します。文字コード切り替えは(:e ++enc=euc-jp)
$ vi /var/lib/julius/word.list
<sil> [] silB
<sil> [] silE
<sp> [] sp
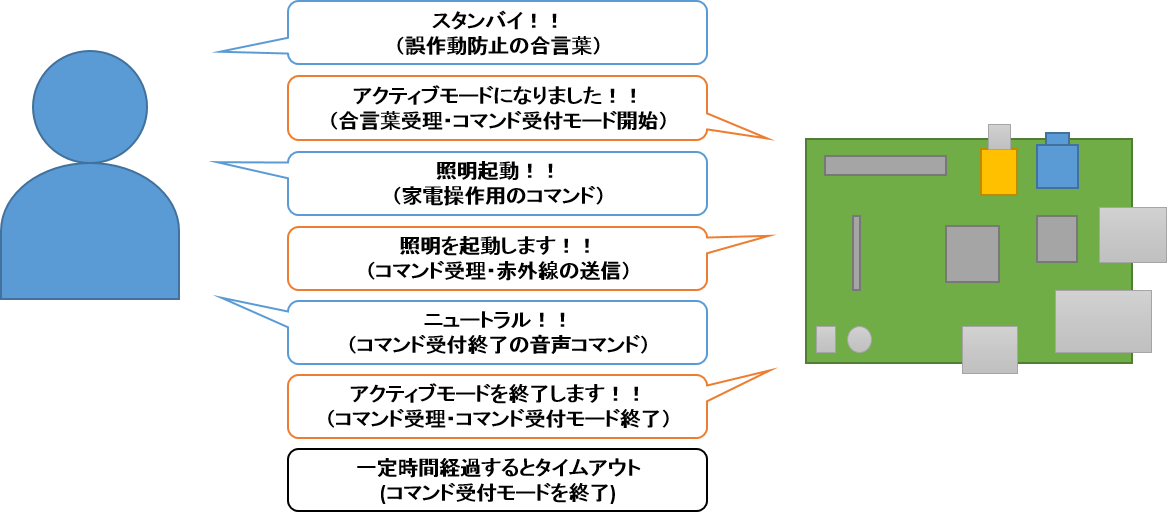
スタンバイ [スタンバイ] s u t a N b a i
ニュートラル [ニュートラル] n u t o r a r u
照明起動 [照明起動] sh o u m e i k i d o u
ライト点ける [照明起動] r a i t o t u k e r u
照明停止 [照明停止] sh o u m e i t e i sh i
ライト消す [照明停止] r a i t o k e s u
暖房起動 [暖房起動] d a N b o u k i d o u
暖房点ける [暖房起動] d a N b o u t u k e r u
暖房停止 [暖房停止] d a N b o u t e i sh i
暖房消す [暖房停止] d a N b o u k e s u
冷房起動 [冷房起動] r e i b o u k i d o u
冷房点ける [冷房起動] r e i b o u t u k e r u
冷房停止 [冷房停止] r e i b o u t e i sh i
冷房消す [冷房停止] r e i b o u k e s u
※ 各自、環境に合わせて単語辞書を書いてください。
Juliusの設定ファイル(テスト稼働用)を作成して記述します。
$ vi /etc/julius/julius_debug.conf
必要な物
・Raspberry Pi
・Raspbianの入ったSDカード
・空のSDカード
・カードリーダライタ
Raspbianの入ったSDカードで起動し
空のSDカードにディスクイメージとなる環境を作ります
SDのパーティション削除とジオメトリの設定
$ sudo fdisk /dev/sda
Command (m for help): p
Disk /dev/sda: 1990 MB, 1990197248 bytes
241 heads, 63 sectors/track, 256 cylinders, total 3887104 sectors
Units = sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disk identifier: 0x00000000
Device Boot Start End Blocks Id System
/dev/sda1 * 63 3886847 1943392+ b W95 FAT32
Command (m for help): d
Selected partition 1
Command (m for help): x
Expert command (m for help): h
Number of heads (1-256, default 241): 255
Expert command (m for help): s
Number of sectors (1-63, default 63): 63
Expert command (m for help): c
Number of cylinders (1-1048576, default 256): 各自計算したシリンダ数
Expert command (m for help): r
Command (m for help): p
Disk /dev/sda: 1990 MB, 1990197248 bytes
255 heads, 63 sectors/track, 241 cylinders, total 3887104 sectors
Units = sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disk identifier: 0x00000000
Device Boot Start End Blocks Id System
Command (m for help): w
The partition table has been altered!
Calling ioctl() to re-read partition table.
Syncing disks.
Command (m for help): n
Partition type:
p primary (0 primary, 0 extended, 4 free)
e extended
Select (default p):
Using default response p
Partition number (1-4, default 1):
Using default value 1
First sector (2048-3887103, default 2048):
Using default value 2048
Last sector, +sectors or +size{K,M,G} (2048-3887103, default 3887103): +64M
Command (m for help): t
Selected partition 1
Hex code (type L to list codes): c
Changed system type of partition 1 to c (W95 FAT32 (LBA))
Command (m for help): a
Partition number (1-4): 1
Command (m for help): p
Disk /dev/sda: 1990 MB, 1990197248 bytes
62 heads, 62 sectors/track, 1011 cylinders, total 3887104 sectors
Units = sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disk identifier: 0x00000000
Device Boot Start End Blocks Id System
/dev/sda1 * 2048 133119 65536 c W95 FAT32 (LBA)
Command (m for help): w
The partition table has been altered!
Calling ioctl() to re-read partition table.
WARNING: If you have created or modified any DOS 6.x
partitions, please see the fdisk manual page for additional
information.
Syncing disks.
Command (m for help): n
Partition type:
p primary (1 primary, 0 extended, 3 free)
e extended
Select (default p):
Using default response p
Partition number (1-4, default 2):
Using default value 2
First sector (133120-3887103, default 133120):
Using default value 133120
Last sector, +sectors or +size{K,M,G} (133120-3887103, default 3887103):
Using default value 3887103
Command (m for help): p
Disk /dev/sda: 1990 MB, 1990197248 bytes
40 heads, 6 sectors/track, 16196 cylinders, total 3887104 sectors
Units = sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disk identifier: 0x00000000
Device Boot Start End Blocks Id System
/dev/sda1 * 2048 133119 65536 c W95 FAT32 (LBA)
/dev/sda2 133120 3887103 1876992 83 Linux
Command (m for help): w
The partition table has been altered!
Calling ioctl() to re-read partition table.
Syncing disks.
rootユーザで/mntをchrootし疑似的にLinuxを触る
chrootするとsudoコマンドは使えないためrootユーザになっておく必要があります
作業中は一応、ヒストリーに履歴が残ってしまうようなので残らないようにしておきます
debootstrapを実行させるとマウントしていた/procがアンマウントされるようなので再度マウントします
$ sudo su –
# export HISTSIZE=0 HISTFILESIZE=0
# chroot /mnt
# mount -n /proc
# export PATH=/bin:/sbin:/usr/bin:/usr/sbin
# /debootstrap/debootstrap –second-stage –no-resolve-deps
# mount -n /proc
リポジトリの追加
これは標準のDevianのリポジトリを追加していますが面倒ならRaspbian側のファイルをコピーしても問題ありません
# vi /etc/apt/sources.list
# See sources.list(5) for more information, especialy
# Remember that you can only use http, ftp or file URIs
# CDROMs are managed through the apt-cdrom tool.
deb http://http.us.debian.org/debian stable main contrib non-free
deb http://non-us.debian.org/debian-non-US stable/non-US main contrib non-free
deb http://security.debian.org stable/updates main contrib non-free
# Uncomment if you want the apt-get source function to work
#deb-src http://http.us.debian.org/debian stable main contrib non-free
#deb-src http://non-us.debian.org/debian-non-US stable/non-US main contrib non-free
“LXTerminal”内に下記のコマンドを1行ずつ実行してください。
# git clone git://git.drogon.net/wiringPi
# cd wiringPi
# git pull origin
# ./build
# cd ../
Rasdiationのインストール
“LXTerminal”内に下記のコマンドを1行ずつ実行してください。
# git clone git://github.com/orsp/Pocket_Rasdiation_Counter.git
# cd Pocket_Rasdiation_Counter
# make
# make install
# cd ../
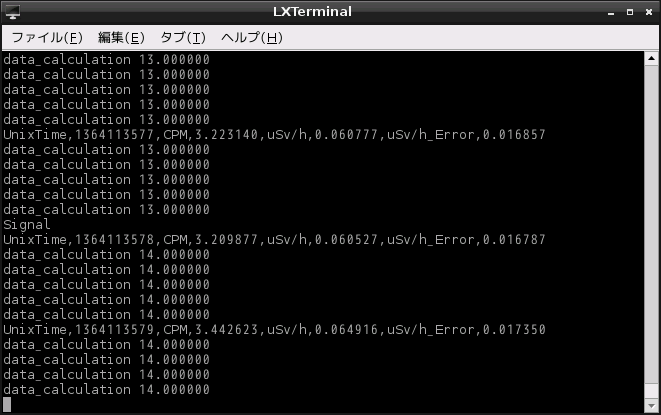
実行結果(最初ポケットガイガー Type5をつついてノイズを発生させてみました)
$ ./a.out
Noise
Signal
Noise
Signal
Noise
Noise
Noise
Signal
Signal
Noise
Noise
Signal
Signal
Noise
Signal
Signal
Signal
Signal
Signal
Signal
![IMG_1589[1]](https://www.orsx.net/wp-content/uploads/2013/03/IMG_15891.jpg)
![IMG_1620[1]](https://www.orsx.net/wp-content/uploads/2013/03/IMG_16201.jpg)
![IMG_1621[1]](https://www.orsx.net/wp-content/uploads/2013/03/IMG_16211.jpg)
![IMG_1622[1]](https://www.orsx.net/wp-content/uploads/2013/03/IMG_16221.jpg)
![IMG_1623[1]](https://www.orsx.net/wp-content/uploads/2013/03/IMG_16231.jpg)
![IMG_1625[1]](https://www.orsx.net/wp-content/uploads/2013/03/IMG_16251.jpg)
![IMG_1627[1]](https://www.orsx.net/wp-content/uploads/2013/03/IMG_16271.jpg)

最近のコメント